
جدول المحتويات
- المقدمة
- الخرافة رقم 1: مقاس واحد يناسب الجميع - AMRs مناسبة لكل أنماط الانتقاء
- الخرافة الثانية: يعد نظام WMS الخاص بك أفضل أداة لإدارة سير العمل بين الإنسان والروبوت
- الخرافة الثالثة: يمكن لبرنامج AMR تحسين التنسيق بين الإنسان والروبوت بشكل مثالي
- الخرافة الرابعة: يمكن للروبوتات وحدها تقليل سفر العمال
- الخرافة الخامسة: الأنظمة الحالية كافية لتنسيق العمل بين الإنسان والروبوت
- الخلاصة
المُقدّمة
مع استمرار نمو اتجاه الروبوتات والأتمتة في المستودعات، ومن المتوقع أن يصل السوق إلى 23.09 مليار دولار أمريكي بحلول عام 2027 وفقًا لدراسة حديثة، من الضروري أن تفهم الشركات كيفية دمج الروبوتات والعاملين البشريين بشكل فعال. ومع ذلك، هناك العديد من المفاهيم الخاطئة الشائعة حول تنسيق المهام وتحسينها بين البشر والروبوتات في المستودع.
الخرافة رقم 1: مقاس واحد يناسب الجميع - أجهزة قياس المقاومة للصدمات مناسبة لكل أنماط الانتقاء
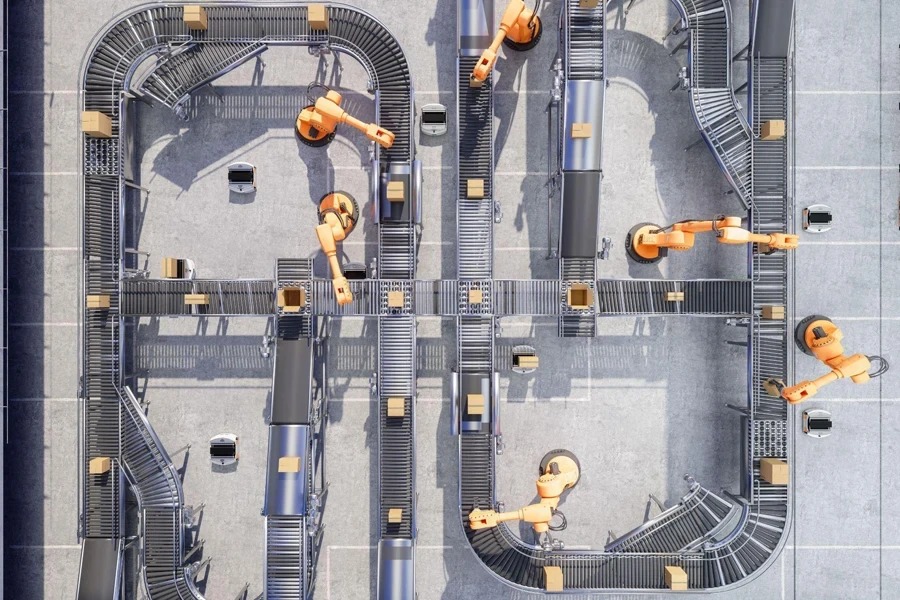
أحد المفاهيم الخاطئة الشائعة هو أن الروبوتات المتنقلة المستقلة (AMRs) يمكنها التعامل مع جميع أنماط الانتقاء بشكل متساوٍ. ومع ذلك، فإن الواقع هو أن مختلف مضادات الميكروبات تتخصص في مسارات عمل مختلفة. تتضمن بعض مسارات العمل هذه نقل الروبوتات إلى البضائع، ومن البضائع إلى الأشخاص، ومتابعة الروبوت، وروبوتات النقل، وتحركات المنصات الكاملة.
للحصول على أفضل مزيج من الروبوتات في مركز التوزيع الخاص بك، قد تحتاج إلى AMRs مختلفة من موفري خدمات مختلفين لتلبية كل عملية. يمكن أن يؤدي ذلك إلى تعقيدات التكامل، حيث قد يكون لكل نظام AMR متطلباته وواجهاته الفريدة.
إن مفتاح التغلب على هذا التحدي هو الاستفادة من شريك التكامل، مثل البرامج الذكية وتقنيات الهاتف المحمول، لتنسيق هذه العمليات وتحسينها. يمكن أن يساعدك هذا النهج القائم على البرامج في تحقيق أقصى استفادة من الروبوتات وتقليل الوقت والجهد لزملاء العمل من البشر، غالبًا دون الحاجة إلى أنظمة أتمتة جديدة أو تغييرات في تخطيطات المستودعات أو أنظمة التخزين.
الخرافة الثانية: يعد نظام WMS الخاص بك أفضل أداة لإدارة سير العمل بين الإنسان والروبوت
هناك اعتقاد شائع آخر وهو أن نظام إدارة المستودعات (WMS) الموجود لديك هو أفضل أداة لإدارة سير العمل الذي يشمل البشر والروبوتات. ومع ذلك، فإن معظم حلول WMS تتبع المنطق الأساسي ومسارات اختيار تسلسل الموقع عند تخصيص العمل، دون النظر في تحسين الدفعة والمسار في سياق التعاون بين الإنسان والروبوت.
لتحسين عملية صنع القرار وتنفيذ المهام في نظام يتضمن البشر والروبوتات، من الضروري تنفيذ طبقة إضافية تعمل على مزامنة المكونات الثلاثة جميعها تحت كيان تحكم واحد. غالبًا ما تفتقر حلول WMS إلى هذه الإمكانية، لأنها تتبع عادةً تسلسل موقع ثابت باستخدام مسار انتقاء ثعباني حول المنشأة، وهو ليس الأمثل دائمًا.
حتى لو كان لدى WMS بعض المسارات المحسنة، فغالبًا ما تكون مشفرة وغير مرنة. لتحقيق نهج ديناميكي حقيقي، يلزم وجود حل يسمح بإجراء تعديلات بديهية في الوقت الفعلي. يمكن لهذه الطبقة الإضافية من التحسين أن تساعد في ضمان عمل البشر والروبوتات معًا بكفاءة، مما يقلل من إهدار الوقت والجهد.

الخرافة الثالثة: يمكن لبرنامج AMR تحسين التنسيق بين الإنسان والروبوت بشكل مثالي
يعتقد الكثير من الناس أن البرامج التي يقدمها بائعو AMR قادرة على تحسين التنسيق بين البشر والروبوتات بشكل مثالي. ومع ذلك، من المهم أن نفهم أن AMRs مصممة لتحسين أداء الروبوت، وليس بالضرورة الأداء البشري.
هناك عمليتان شائعتان تتضمنان AMRs: أنماط متابعة الروبوت/الروبوت واختيار المنطقة. في انتقاء الروبوت، يتبع الإنسان الروبوت، وغالبًا ما يعتمد ذلك على المهام المخصصة بواسطة WMS. انتقاء المنطقة يبقي البشر في منطقة ثابتة، مما يقلل من سفر الإنسان ولكنه يتطلب تخصيص المنتقيين للمناطق الصحيحة وجاهزين لمقاومة مضادات الميكروبات. يمكن أن يكون كلا النهجين ثابتًا تمامًا وقد لا يعملان على تحسين السفر البشري بشكل كامل.
يتضمن التحسين الحقيقي ثلاثة جوانب رئيسية: تحديد أولويات العمل، وتحسين الدفعة، وإيجاد مسار الاختيار الأكثر كفاءة. يجب أن يأخذ نظام السيناريو الأفضل هذه الأولويات في الاعتبار على أساس الوقت المناسب، مما يزيد من كثافة الانتقاء وإنشاء دفعات أفضل. عندما تدخل الطلبات الجديدة إلى النظام، يجب أن يتم تحديدها تلقائيًا وترتيب أولوياتها بشكل مناسب. يجب أن يتمتع قادة المستودعات والمشرفون بالتحكم الكامل في تغيير الأولوية لطلباتهم، مما يضمن أن النظام يعمل عند الطلب ويوفر دائمًا العمل ذي الأولوية الأمثل عندما يطلب المستخدم ذلك.
الخرافة الرابعة: الروبوتات وحدها يمكنها تقليل سفر العمال
من المفاهيم الخاطئة الشائعة الأخرى أن الروبوتات نفسها يمكنها تقليل تنقلات العمال في المستودع. في حين أن اختيار المنطقة يمكن أن يقلل من سفر الإنسان عن طريق إبقاء العمال في منطقة معينة، فمن غير المرجح أن يحقق قطف الروبوتات نفس النتيجة.
في قطف الروبوتات، يتنقل العامل البشري حول المستودع مع الروبوت، متبعًا نفس المسار. على الرغم من أن مسار الروبوت الأمثل يمكن أن يؤدي إلى طريق أكثر كفاءة للإنسان، إلا أن المفهوم لا يزال يتضمن ربط الإنسان والروبوت معًا، وهو ما قد لا يكون دائمًا النهج الأكثر كفاءة.
من ناحية أخرى، يمكن أن يؤدي الانتقاء على أساس المنطقة إلى تقليل سفر الإنسان، لكنه نظام صارم للغاية. في هذا السيناريو، يتم تعيين البشر إلى مناطق محددة ويجب أن يكونوا حاضرين عند وصول الروبوت لاختيار العناصر وتحميلها. إذا احتاج العامل إلى أخذ قسط من الراحة أو لم يتم استبداله، فقد يبدأ الحل بأكمله في الانهيار. بالإضافة إلى ذلك، قد يكون تحقيق التوازن بين القوى العاملة في النظام القائم على المنطقة أمرًا صعبًا، حيث قد تختلف متطلبات الانتقاء بشكل كبير من يوم إلى آخر، مما يؤدي إلى عدم استغلال الموظفين بشكل كافٍ أو إرهاقهم في مناطق معينة.
لتقليل سفر العمال بشكل حقيقي، من الضروري تنسيق سفر كل من الروبوتات والبشر. يسمح هذا النهج للعمال بالسفر ديناميكيًا إلى موقع الاختيار الأمثل والالتقاء بمقاومة مضادات الميكروبات (AMR) هناك، مما يقلل من السفر مع الحفاظ على المرونة. من خلال دمج طبقة من التنسيق التي تقلل من وقت العامل في وجه الانتقاء، يمكن للشركات إنشاء نظام أكثر كفاءة وقدرة على التكيف يعمل على تحسين الأداء البشري والروبوت.
الخرافة الخامسة: الأنظمة الحالية كافية لتنسيق العمل بين الإنسان والروبوت
أخيرًا، هناك اعتقاد شائع بأن الأنظمة الحالية، مثل برامج WMS وAMR، كافية لتنظيم عمل البشر والروبوتات في المستودع. ومع ذلك، غالبًا ما تفتقر هذه الأنظمة إلى قدرات التنسيق الحقيقية، مع التركيز بشكل أكبر على الاختيار الأسهل التالي حيث يكون الروبوت موجودًا بالفعل في نفس الممر.
لتحقيق التحسين الحقيقي، من الضروري دمج برامج النظام والذكاء الاصطناعي (AI) الذي يوفر الذكاء اللازم. يجب أن يكون التركيز الأساسي للتحسين هو تقليل مسار الاختيار البشري، والذي غالبًا ما يتم تجاهله بواسطة أنظمة AMR وWMS.
لا يتبع التنسيق الحقيقي والتحسين نهجًا صارمًا للانتقاء يعتمد على المنطقة. وبدلاً من ذلك، فإنها تستخدم نموذجًا هجينًا حيث يتخذ النظام قرارات ديناميكيًا في نقاط مختلفة لتقليل سفر الإنسان. تعمل هذه المرونة وديناميكية اتخاذ القرار على وضع التنسيق والتحسين الحقيقيين بعيدًا عن الأنظمة التقليدية.
على سبيل المثال، في سير عمل الانتقاء المدعوم بـ AMR، يمكن للعامل تجنب المشي غير الضروري عن طريق انتقاء العناصر إلى حقيبة على AMR، وتوجيه AMR إلى نظام ناقل لتفريغ الحمولة، ثم تشغيل روبوت آخر للانتقال إلى مكانه ليتمكن العامل من استمر في الانتقاء. يمكن توجيه الواجهات مع الروبوتات والعمال عن طريق الصوت، على غرار أنظمة التقاط الصوت التقليدية، حيث يؤكد العمال عملهم باستخدام الصوت أو المسح الضوئي أو RFID أو الشاشات أو الأضواء المثبتة على الروبوت.
وفي الختام
في الختام، يعد دمج الروبوتات والعمال البشريين في المستودع عملية معقدة تتطلب فهمًا عميقًا لمختلف التحديات والمفاهيم الخاطئة المحيطة بالموضوع. ومن خلال فضح هذه الخرافات الخمس الشائعة، يمكن للشركات أن تفهم بشكل أفضل أهمية التنسيق الفعال والتحسين في تحقيق الفوائد الكاملة للتعاون بين الإنسان والروبوت.
لدمج الروبوتات والبشر بنجاح في المستودع، يجب على الشركات معالجة تحديات العمل من خلال دمج الروبوتات في مسارات عمل متعددة، وتخصيص العمال والروبوتات ديناميكيًا لتحقيق أقصى قدر من الإنتاجية، وتحسين بيئة العمل والسلامة. ومن خلال استخدام البرامج الذكية والذكاء الاصطناعي والنهج المرن والهجين للتنسيق، يمكن للشركات إطلاق العنان للإمكانات الحقيقية للتعاون بين الإنسان والروبوت والبقاء في المقدمة في عالم آلي بشكل متزايد.
هل تبحث عن حل لوجستي بأسعار تنافسية ورؤية كاملة ودعم عملاء يمكن الوصول إليه بسهولة؟ تفحص ال سوق Chovm.com Logistics اليوم.



