
İçindekiler
- Giriş
– Efsane #1: Herkese uyan tek beden – AMR'ler her toplama stiline uygundur
– Efsane #2: WMS'niz insan-robot iş akışlarını yönetmek için en iyi araçtır
– Efsane #3: AMR yazılımı insan ve robot koordinasyonunu mükemmel şekilde optimize edebilir
– Efsane #4: Robotlar tek başına çalışanların yolculuklarını en aza indirebilir
– Efsane #5: Mevcut sistemler insan-robot çalışmasının düzenlenmesi için yeterlidir
- Sonuç
Giriş
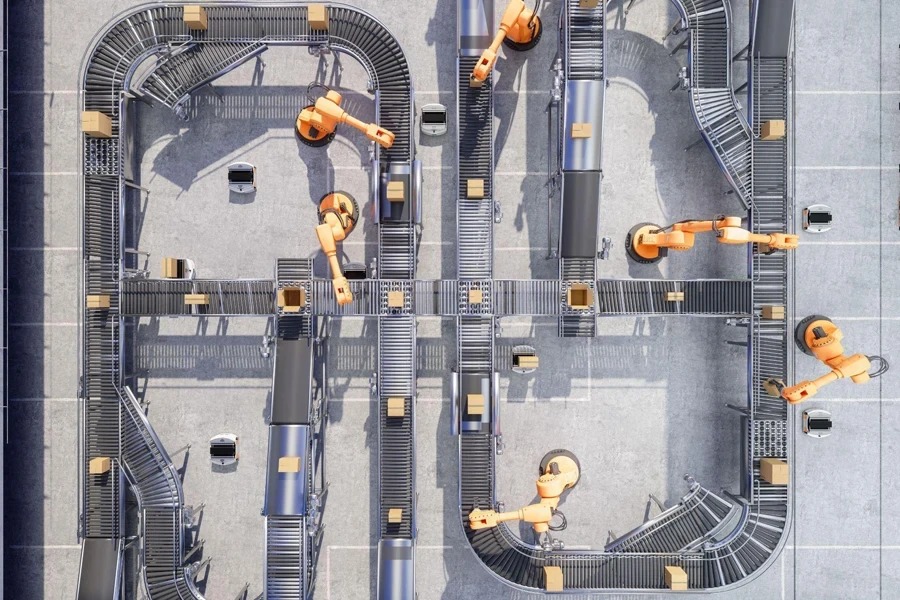
Robotik ve otomasyon trendi depolarda büyümeye devam ederken ve yakın zamanda yapılan bir araştırmaya göre pazarın 23.09 yılına kadar 2027 milyar ABD dolarına ulaşması beklenirken, işletmelerin robotları ve insan çalışanlarını etkili bir şekilde nasıl entegre edeceklerini anlaması büyük önem taşıyor. Ancak depodaki insanlar ve robotlar arasındaki görevlerin koordine edilmesi ve optimize edilmesi konusunda bazı yaygın yanılgılar vardır.
Efsane #1: Herkese uyan tek beden – AMR'ler her toplama stiline uygundur
Yaygın bir yanılgı, otonom mobil robotların (AMR'ler) tüm toplama stillerini eşit derecede iyi işleyebileceğidir. Ancak gerçek şu ki, farklı AMR'ler farklı iş akışlarında uzmanlaşmıştır. Bu iş akışlarından bazıları robotlardan mallara, mallardan kişiye, robotu takip etme, taşıma robotları ve tam palet taşımalarını içerir.
Dağıtım merkezinizde en iyi robotik karışımını elde etmek için, her süreci karşılamak üzere çeşitli sağlayıcılardan farklı AMR'lere ihtiyacınız olabilir. Her AMR sisteminin kendine özgü gereksinimleri ve arayüzleri olabileceğinden bu durum entegrasyon karmaşıklıklarına yol açabilir.
Bu zorluğun üstesinden gelmenin anahtarı, bu süreçleri düzenlemek ve optimize etmek için akıllı yazılım ve mobil teknolojiler gibi bir entegrasyon ortağından yararlanmaktır. Bu yazılım tabanlı yaklaşım, genellikle yeni otomasyon sistemleri veya depo düzenlerinde veya depolama sistemlerinde değişiklik gerektirmeden, robotlardan en iyi şekilde yararlanmanıza ve iş arkadaşlarınızın zamanını ve çabasını azaltmanıza yardımcı olabilir.
Efsane #2: WMS'niz insan-robot iş akışlarını yönetmek için en iyi araçtır
Diğer bir yaygın inanç da mevcut Depo Yönetim Sisteminizin (WMS), hem insanları hem de robotları içeren iş akışlarını yönetmek için en iyi araç olduğudur. Ancak çoğu WMS çözümü, iş tahsis ederken, insan-robot işbirliği bağlamında toplu iş ve yol optimizasyonunu dikkate almadan, temel mantık ve konum sırası seçme yollarını takip eder.
İnsanların ve robotların yer aldığı bir sistemde karar almayı ve görev yürütmeyi gerçekten optimize etmek için, üç bileşenin tümünü tek bir kontrol birimi altında senkronize eden ek bir katmanın uygulanması önemlidir. WMS çözümleri genellikle bu yeteneğe sahip değildir, çünkü genellikle tesis çevresinde yılan toplama yolunu kullanarak sabit bir konum sırasını takip ederler ve bu her zaman optimal değildir.
Bir WMS'nin bazı optimize edilmiş yolları olsa bile, bunlar genellikle sabit kodlanmıştır ve esnek değildir. Gerçekten dinamik bir yaklaşım elde etmek için sezgisel, gerçek zamanlı ayarlamalara olanak tanıyan bir çözüm gereklidir. Bu ek optimizasyon katmanı, insanların ve robotların birlikte verimli bir şekilde çalışmasını sağlayarak zaman ve çaba israfını en aza indirmeye yardımcı olabilir.

Efsane #3: AMR yazılımı insan ve robot koordinasyonunu mükemmel şekilde optimize edebilir
Birçok kişi, AMR satıcıları tarafından sağlanan yazılımın, insanlar ve robotlar arasındaki koordinasyonu mükemmel şekilde optimize edebildiğine inanıyor. Ancak AMR'lerin insan performansını değil, robot performansını optimize etmek için tasarlandığını anlamak önemlidir.
AMR'leri içeren iki yaygın süreç vardır: robotu takip etme/cobot stilleri ve bölge toplama. Cobot toplamada, genellikle WMS tarafından tahsis edilen görevlere dayalı olarak bir insan robotu takip eder. Bölge toplama, insanları sabit bir bölgede tutarak insan seyahatini azaltır ancak toplayıcıların doğru bölgelere atanmasını ve AMR'ler için hazır olmasını gerektirir. Her iki yaklaşım da oldukça statik olabilir ve insan seyahatini tam anlamıyla optimize edemeyebilir.
Gerçek optimizasyon üç temel hususu içerir: iş önceliklendirmesi, toplu optimizasyon ve en etkili toplama yolunu bulma. En iyi durum senaryosu sistemi bu öncelikleri tam zamanında dikkate almalı, toplama yoğunluğunu artırmalı ve daha iyi partiler oluşturmalıdır. Yeni siparişler sisteme girdikçe otomatik olarak sıralanmalı ve uygun şekilde önceliklendirilmelidir. Depo liderleri ve denetçiler, sistemin talep üzerine çalışmasını ve bir kullanıcı talep ettiğinde her zaman en uygun şekilde önceliklendirilmiş iş sağlamasını sağlayarak, siparişlerinin önceliklerini değiştirme konusunda tam kontrole sahip olmalıdır.
Efsane #4: Robotlar tek başına çalışanların seyahatini en aza indirebilir
Bir diğer yaygın yanılgı da robotların depodaki işçi seyahatini en aza indirebileceğidir. Bölge toplama, işçileri belirli bir alanda tutarak insan seyahatini azaltabilirken, cobot toplamanın aynı sonucu elde etmesi pek olası değildir.
Cobot toplamada insan işçi, robotla birlikte depoda aynı yolu izleyerek dolaşır. Optimize edilmiş bir robot yolu, insan için daha verimli bir rotaya yol açsa da, konsept yine de insan ve robotun birbirine bağlanmasını içerir ve bu her zaman en verimli yaklaşım olmayabilir.
Öte yandan bölgeye dayalı toplama, insan seyahatini azaltabilir ancak bu çok katı bir sistemdir. Bu senaryoda, insanlar belirli bölgelere atanır ve bir robot öğeleri alıp yüklemek için geldiğinde orada bulunmaları gerekir. Bir çalışanın ara vermesi gerekiyorsa veya değiştirilmezse tüm çözüm çökmeye başlayabilir. Ek olarak, bölge bazlı bir sistemde iş gücünün dengelenmesi zor olabilir; çünkü toplama talepleri bir günden diğerine önemli ölçüde değişebilir ve bu da belirli bölgelerde personelin gereğinden az kullanılmasına veya fazla çalışmasına neden olur.
İşçi seyahatini gerçekten en aza indirmek için hem robotların hem de insanların seyahatini uyumlu hale getirmek çok önemlidir. Bu yaklaşım, çalışanların dinamik olarak en optimize edilmiş toplama lokasyonuna gitmesine ve orada AMR ile buluşmasına olanak tanıyarak esnekliği korurken seyahati azaltır. İşletmeler, çalışanların toplama sırasında geçirdiği zamanı en aza indiren bir düzenleme katmanını birleştirerek hem insan hem de robot performansını optimize eden daha verimli ve uyarlanabilir bir sistem oluşturabilir.
Efsane #5: Mevcut sistemler insan-robot çalışmasını düzenlemek için yeterlidir
Son olarak, WMS ve AMR yazılımı gibi mevcut sistemlerin depodaki insanların ve robotların işlerini düzenlemek için yeterli olduğuna dair yaygın bir inanç var. Bununla birlikte, bu sistemler genellikle gerçek düzenleme yeteneklerinden yoksundur ve aynı koridorda bir robotun mevcut olduğu bir sonraki en kolay seçime daha fazla odaklanır.
Gerçek optimizasyona ulaşmak için gerekli zekayı sağlayan sistem yazılımını ve yapay zekayı (AI) birleştirmek çok önemlidir. Optimizasyonun birincil odağı, AMR ve WMS sistemleri tarafından sıklıkla gözden kaçırılan insan toplama yolunu en aza indirmek olmalıdır.
Gerçek orkestrasyon ve optimizasyon katı bir bölge bazlı toplama yaklaşımını izlemez. Bunun yerine, insanların seyahatini azaltmak için sistemin çeşitli noktalarda dinamik olarak kararlar aldığı hibrit bir model kullanıyorlar. Bu esneklik ve dinamik karar alma, gerçek orkestrasyon ve optimizasyonu geleneksel sistemlerden farklı kılar.
Örneğin, AMR destekli bir toplama iş akışında bir çalışan, öğeleri AMR'deki bir sepete toplayarak, AMR'yi boşaltma için bir konveyör sistemine yönlendirerek ve ardından işçinin yerine hareket etmesi için başka bir robotu tetikleyerek gereksiz yürümeyi önleyebilir. toplamaya devam edin. Robotlar ve çalışanlarla olan arayüzler, geleneksel ses toplama sistemlerine benzer şekilde sesle yönetilebiliyor; çalışanlar işlerini ses, tarama, RFID veya robota monte ekranlar veya ışıklar kullanarak onaylıyor.
Sonuç
Sonuç olarak, robotları ve insan çalışanlarını depoya entegre etmek, konuyu çevreleyen çeşitli zorlukların ve yanlış anlamaların derinlemesine anlaşılmasını gerektiren karmaşık bir süreçtir. İşletmeler, bu beş yaygın efsaneyi çürüterek, insan-robot iş birliğinin tüm faydalarını elde etmede etkili orkestrasyon ve optimizasyonun önemini daha iyi anlayabilir.
Robotları ve insanları depoya başarılı bir şekilde entegre etmek için şirketlerin, robotları birden fazla iş akışına dahil ederek, üretkenliği en üst düzeye çıkarmak için çalışanları ve robotları dinamik olarak tahsis ederek ve ergonomiyi ve güvenliği iyileştirerek işgücü zorluklarını ele alması gerekir. İşletmeler, akıllı yazılım, yapay zeka ve esnek, hibrit bir orkestrasyon yaklaşımı kullanarak insan-robot iş birliğinin gerçek potansiyelini ortaya çıkarabilir ve giderek otomatikleşen bir dünyada önde kalabilir.
Rekabetçi fiyatlandırma, tam görünürlük ve kolayca erişilebilen müşteri desteğine sahip bir lojistik çözümü mü arıyorsunuz? Kontrol et Chovm.com Lojistik Pazaryeri bugün.



