
کی میز کے مندرجات
- تعارف
- افسانہ نمبر 1: ایک سائز سب پر فٹ بیٹھتا ہے - AMRs ہر چننے کے انداز کے لیے موزوں ہیں۔
- متک #2: آپ کا WMS انسانی روبوٹ ورک فلو کو منظم کرنے کا بہترین ٹول ہے۔
- افسانہ #3: AMR سافٹ ویئر انسان اور روبوٹ کوآرڈینیشن کو بالکل بہتر بنا سکتا ہے۔
- افسانہ نمبر 4: اکیلے روبوٹ کارکن کے سفر کو کم کر سکتے ہیں۔
- متک #5: موجودہ نظام انسانی روبوٹ کے کام کو ترتیب دینے کے لیے کافی ہیں۔
- نتیجہ اخذ کرنا
تعارف
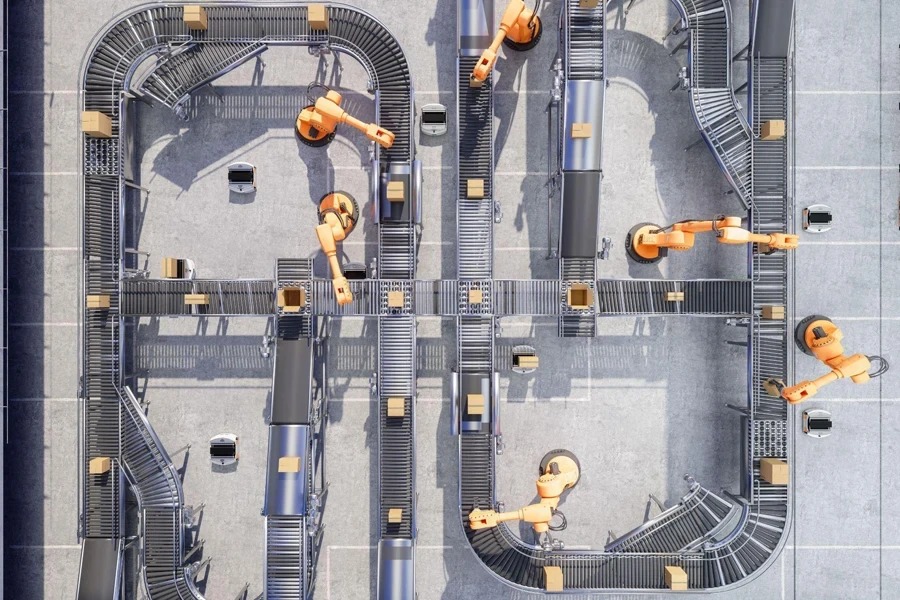
چونکہ گوداموں میں روبوٹکس اور آٹومیشن کا رجحان بڑھتا ہی جا رہا ہے، ایک حالیہ تحقیق کے مطابق 23.09 تک مارکیٹ USD 2027 بلین تک پہنچنے کی توقع کے ساتھ، کاروباری اداروں کے لیے یہ سمجھنا بہت ضروری ہے کہ روبوٹس اور انسانی کارکنوں کو مؤثر طریقے سے کیسے مربوط کیا جائے۔ تاہم، گودام میں انسانوں اور روبوٹ کے درمیان کاموں کو مربوط اور بہتر بنانے کے بارے میں کئی عام غلط فہمیاں پائی جاتی ہیں۔
افسانہ نمبر 1: ایک سائز سب پر فٹ بیٹھتا ہے – AMRs ہر چننے کے انداز کے لیے موزوں ہیں۔
ایک عام غلط فہمی یہ ہے کہ خود مختار موبائل روبوٹس (AMRs) تمام چننے کے انداز کو یکساں طور پر سنبھال سکتے ہیں۔ تاہم، حقیقت یہ ہے کہ مختلف AMRs مختلف ورک فلو میں مہارت رکھتے ہیں۔ ان میں سے کچھ ورک فلو میں روبوٹ سے سامان، سامان سے فرد، روبوٹ کی پیروی، ٹرانزٹ روبوٹس، اور فل پیلیٹ حرکتیں شامل ہیں۔
اپنے ڈسٹری بیوشن سینٹر میں روبوٹکس کا بہترین امتزاج حاصل کرنے کے لیے، آپ کو ہر عمل کو پورا کرنے کے لیے مختلف فراہم کنندگان سے مختلف AMRs کی ضرورت ہو سکتی ہے۔ یہ انضمام کی پیچیدگیوں کا باعث بن سکتا ہے، کیونکہ ہر AMR سسٹم کی اپنی منفرد ضروریات اور انٹرفیس ہو سکتے ہیں۔
اس چیلنج پر قابو پانے کی کلید ان عملوں کو ترتیب دینے اور بہتر بنانے کے لیے انٹیگریشن پارٹنر، جیسے سمارٹ سافٹ ویئر اور موبائل ٹیکنالوجیز کا استعمال کرنا ہے۔ یہ سافٹ ویئر پر مبنی نقطہ نظر آپ کو روبوٹس سے زیادہ سے زیادہ فائدہ اٹھانے اور انسانی ساتھی کارکنوں کے لیے وقت اور محنت کو کم کرنے میں مدد کر سکتا ہے، اکثر نئے آٹومیشن سسٹم یا گودام کے لے آؤٹ یا اسٹوریج سسٹم میں تبدیلی کی ضرورت کے بغیر۔
متک #2: آپ کا WMS انسانی روبوٹ ورک فلو کو منظم کرنے کے لیے بہترین ٹول ہے۔
ایک اور عام خیال یہ ہے کہ آپ کا موجودہ ویئر ہاؤس مینجمنٹ سسٹم (WMS) ورک فلو کے انتظام کے لیے بہترین ٹول ہے جس میں انسان اور روبوٹ دونوں شامل ہیں۔ تاہم، زیادہ تر ڈبلیو ایم ایس حل انسانی روبوٹ تعاون کے تناظر میں بیچ اور راستے کی اصلاح پر غور کیے بغیر کام کو مختص کرتے وقت بنیادی منطق اور مقام کی ترتیب کے انتخاب کے راستوں کی پیروی کرتے ہیں۔
انسانوں اور روبوٹس پر مشتمل نظام میں فیصلہ سازی اور ٹاسک پر عمل درآمد کو صحیح معنوں میں بہتر بنانے کے لیے، ایک اضافی پرت کو لاگو کرنا ضروری ہے جو تینوں اجزاء کو ایک کنٹرولنگ ہستی کے تحت ہم آہنگ کرے۔ ڈبلیو ایم ایس کے حل میں اکثر اس صلاحیت کی کمی ہوتی ہے، کیونکہ وہ عام طور پر سہولت کے ارد گرد سانپ چننے والے راستے کا استعمال کرتے ہوئے ایک مقررہ مقام کی ترتیب کی پیروی کرتے ہیں، جو ہمیشہ بہترین نہیں ہوتا ہے۔
یہاں تک کہ اگر WMS کے پاس کچھ بہتر راستے ہیں، وہ اکثر ہارڈ کوڈ اور لچکدار ہوتے ہیں۔ واقعی ایک متحرک نقطہ نظر حاصل کرنے کے لیے، ایک ایسا حل درکار ہے جو بدیہی ریئل ٹائم ایڈجسٹمنٹ کی اجازت دیتا ہو۔ اصلاح کی یہ اضافی تہہ اس بات کو یقینی بنانے میں مدد کر سکتی ہے کہ انسان اور روبوٹ مؤثر طریقے سے کام کر رہے ہیں، ضائع ہونے والے وقت اور کوشش کو کم سے کم کر رہے ہیں۔

متک #3: AMR سافٹ ویئر انسان اور روبوٹ کوآرڈینیشن کو بالکل بہتر بنا سکتا ہے۔
بہت سے لوگوں کا خیال ہے کہ AMR وینڈرز کی طرف سے فراہم کردہ سافٹ ویئر انسانوں اور روبوٹس کے درمیان ہم آہنگی کو مکمل طور پر بہتر بنانے کی صلاحیت رکھتا ہے۔ تاہم، یہ سمجھنا ضروری ہے کہ AMRs کو روبوٹ کی کارکردگی کو بہتر بنانے کے لیے ڈیزائن کیا گیا ہے، ضروری نہیں کہ انسانی کارکردگی۔
AMRs پر مشتمل دو عام عمل ہیں: فالو-دی-روبوٹ/کوبوٹ اسٹائلز اور زون چننا۔ کوبوٹ چننے میں، ایک انسان روبوٹ کی پیروی کرتا ہے، جو اکثر WMS کے مختص کردہ کاموں پر مبنی ہوتا ہے۔ زون چننا انسانوں کو ایک مقررہ زون میں رکھتا ہے، جس سے انسانی سفر کم ہوتا ہے لیکن چننے والوں کو درست زون میں مختص کرنے اور AMRs کے لیے تیار رہنے کی ضرورت ہوتی ہے۔ دونوں نقطہ نظر کافی جامد ہو سکتے ہیں اور ہو سکتا ہے کہ انسانی سفر کو مکمل طور پر بہتر نہ کریں۔
صحیح اصلاح میں تین اہم پہلو شامل ہیں: کام کی ترجیح، بیچ کی اصلاح، اور سب سے زیادہ موثر انتخاب کا راستہ تلاش کرنا۔ بہترین صورت حال کے نظام کو ان ترجیحات پر وقتی بنیادوں پر غور کرنا چاہیے، پک کثافت میں اضافہ اور بہتر بیچز بنانا چاہیے۔ جیسے ہی نئے آرڈر سسٹم میں داخل ہوتے ہیں، انہیں خود بخود سلاٹ کیا جانا چاہیے اور مناسب طریقے سے ترجیح دی جانی چاہیے۔ گودام کے لیڈز اور سپروائزرز کو اپنے آرڈرز کے لیے ترجیحات کو تبدیل کرنے پر مکمل کنٹرول ہونا چاہیے، اس بات کو یقینی بنانا چاہیے کہ سسٹم آن ڈیمانڈ کام کرتا ہے اور جب صارف اس کی درخواست کرتا ہے تو ہمیشہ بہترین ترجیحی کام فراہم کرتا ہے۔
متک #4: اکیلے روبوٹ کارکن کے سفر کو کم کر سکتے ہیں۔
ایک اور عام غلط فہمی یہ ہے کہ روبوٹ خود گودام میں کارکنوں کے سفر کو کم سے کم کر سکتے ہیں۔ اگرچہ زون چننے سے کارکنوں کو ایک مخصوص علاقے میں رکھ کر انسانی سفر کو کم کیا جا سکتا ہے، لیکن کوبوٹ چننے سے وہی نتیجہ حاصل کرنے کا امکان نہیں ہے۔
کوبوٹ چننے میں، انسانی کارکن اسی راستے پر چلتے ہوئے، روبوٹ کے ساتھ گودام کے ارد گرد سفر کرتا ہے۔ اگرچہ ایک بہتر روبوٹ کا راستہ انسان کے لیے زیادہ موثر راستے کی طرف لے جا سکتا ہے، لیکن اس تصور میں اب بھی انسان اور روبوٹ کو ایک دوسرے کے ساتھ باندھنا شامل ہے، جو کہ ہمیشہ سب سے زیادہ کارآمد طریقہ نہیں ہو سکتا۔
دوسری طرف، زون پر مبنی چننے سے انسانی سفر کم ہو سکتا ہے، لیکن یہ ایک بہت ہی سخت نظام ہے۔ اس منظر نامے میں، انسانوں کو مخصوص علاقوں میں تفویض کیا جاتا ہے اور جب کوئی روبوٹ اشیاء لینے اور لوڈ کرنے کے لیے آتا ہے تو اس کا موجود ہونا ضروری ہے۔ اگر کسی کارکن کو وقفہ لینے کی ضرورت ہوتی ہے یا اسے تبدیل نہیں کیا جاتا ہے، تو پورا حل ٹوٹنا شروع ہو سکتا ہے۔ مزید برآں، زون پر مبنی نظام میں افرادی قوت کو متوازن کرنا مشکل ہو سکتا ہے، کیونکہ چننے کے مطالبات ایک دن سے دوسرے دن میں نمایاں طور پر مختلف ہو سکتے ہیں، جس کی وجہ سے بعض زونز میں کم استعمال شدہ یا زیادہ کام کرنے والے عملے کا باعث بنتا ہے۔
کارکنوں کے سفر کو صحیح معنوں میں کم کرنے کے لیے، روبوٹس اور انسانوں دونوں کے سفر کو ہم آہنگ کرنا ضروری ہے۔ یہ نقطہ نظر کارکنوں کو متحرک طور پر سب سے زیادہ بہتر انتخاب کی جگہ کا سفر کرنے اور وہاں AMR سے ملنے کی اجازت دیتا ہے، لچک کو برقرار رکھتے ہوئے سفر کو کم کرتا ہے۔ آرکیسٹریشن کی ایک پرت کو شامل کرنے سے جو کہ انتخابی چہرے پر کارکن کے وقت کو کم سے کم کرتا ہے، کاروبار ایک زیادہ موثر اور موافقت پذیر نظام بنا سکتے ہیں جو انسانی اور روبوٹ دونوں کی کارکردگی کو بہتر بناتا ہے۔
متک #5: موجودہ نظام انسانی روبوٹ کے کام کو ترتیب دینے کے لیے کافی ہیں۔
آخر میں، ایک عام خیال ہے کہ موجودہ نظام، جیسے WMS اور AMR سافٹ ویئر، گودام میں انسانوں اور روبوٹ کے کام کو ترتیب دینے کے لیے کافی ہیں۔ تاہم، ان سسٹمز میں اکثر آرکیسٹریشن کی حقیقی صلاحیتوں کا فقدان ہوتا ہے، جو اگلے سب سے آسان انتخاب پر زیادہ توجہ مرکوز کرتے ہیں جہاں ایک روبوٹ پہلے سے ہی اسی گلیارے میں موجود ہوتا ہے۔
حقیقی اصلاح حاصل کرنے کے لیے، سسٹم سافٹ ویئر اور مصنوعی ذہانت (AI) کو شامل کرنا بہت ضروری ہے جو ضروری ذہانت فراہم کرتے ہیں۔ اصلاح کی بنیادی توجہ انسانی چننے کے راستے کو کم سے کم کرنا چاہیے، جسے AMR اور WMS سسٹمز اکثر نظر انداز کر دیتے ہیں۔
حقیقی آرکیسٹریشن اور اصلاح ایک سخت زون پر مبنی چننے کے طریقہ کار کی پیروی نہیں کرتے ہیں۔ اس کے بجائے، وہ ایک ہائبرڈ ماڈل استعمال کرتے ہیں جہاں نظام انسانی سفر کو کم کرنے کے لیے مختلف مقامات پر متحرک طور پر فیصلے کرتا ہے۔ یہ لچک اور متحرک فیصلہ سازی روایتی نظاموں کے علاوہ حقیقی آرکیسٹریشن اور اصلاح کا تعین کرتی ہے۔
مثال کے طور پر، AMR سے تعاون یافتہ پکنگ ورک فلو میں، ایک کارکن AMR پر ٹوٹی ہوئی اشیاء کو اٹھا کر، AMR کو اتارنے کے لیے کنویئر سسٹم کی طرف ہدایت دے کر، اور پھر کارکن کو چننا جاری رکھنے کے لیے ایک اور روبوٹ کو جگہ پر منتقل کرنے کے لیے متحرک کر کے غیر ضروری چلنے سے بچ سکتا ہے۔ روبوٹس اور کارکنوں کے ساتھ انٹرفیس کو آواز کے ذریعے ہدایت کی جا سکتی ہے، روایتی آواز چننے کے نظام کی طرح، کارکنان اپنے کام کی تصدیق آواز، اسکین، RFID، یا روبوٹ سے لگی سکرین یا لائٹس کا استعمال کرتے ہوئے کرتے ہیں۔
نتیجہ
آخر میں، گودام میں روبوٹس اور انسانی کارکنوں کو اکٹھا کرنا ایک پیچیدہ عمل ہے جس کے لیے موضوع کے ارد گرد موجود مختلف چیلنجوں اور غلط فہمیوں کی گہری سمجھ کی ضرورت ہوتی ہے۔ ان پانچ عام خرافات کو ختم کرنے سے، کاروبار انسانی روبوٹ تعاون کے مکمل فوائد حاصل کرنے میں مؤثر آرکیسٹریشن اور اصلاح کی اہمیت کو بہتر طور پر سمجھ سکتے ہیں۔
گودام میں روبوٹس اور انسانوں کو کامیابی کے ساتھ مربوط کرنے کے لیے، کمپنیوں کو روبوٹس کو متعدد ورک فلو میں شامل کرکے، زیادہ سے زیادہ پیداواری صلاحیت کے لیے کارکنوں اور روبوٹس کو متحرک طور پر مختص کرکے، اور ergonomics اور حفاظت کو بہتر بنا کر مزدوری کے چیلنجوں سے نمٹنا چاہیے۔ سمارٹ سافٹ ویئر، AI، اور آرکیسٹریشن کے لیے ایک لچکدار، ہائبرڈ نقطہ نظر کا استعمال کرکے، کاروبار انسانی روبوٹ تعاون کی حقیقی صلاحیت کو کھول سکتے ہیں اور بڑھتی ہوئی خودکار دنیا میں آگے رہ سکتے ہیں۔
مسابقتی قیمتوں، مکمل مرئیت، اور آسانی سے قابل رسائی کسٹمر سپورٹ کے ساتھ لاجسٹک حل تلاش کر رہے ہیں؟ چیک کریں Chovm.com لاجسٹک مارکیٹ پلیس آج.



